Alors que l’atterrisseur Insight terminait de déployer la sonde thermique HP3 à la surface de la planète rouge, la NASA annonçait la fin officielle de la mission Mars Exploration Rover. Cette dernière, lancée il y a plus de 15 ans comportait deux rovers : Spirit et Opportunity. C’est ce second qui, après de longues années de loyaux services et de longs kilomètres parcourus, a rendu l’âme. Revenons un instant sur cette incroyable mission qui nous a permis de grandement améliorer notre connaissance de la planète rouge et notamment de sa géologie.
Histoire
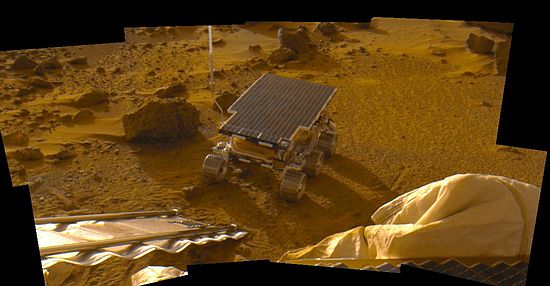
L’exploration américaine du sol de Mars commence dans les années 1970 avec le tout premier atterrisseur : Viking 1 qui se pose en 1976. Seize ans après, la NASA lance sa sonde la plus chère pour un coût de 813 millions de dollars de l’époque : Mars Observer. Celle-ci devait se mettre en orbite afin d’étudier la surface, le champ magnétique et l’atmosphère de la planète. « Devait » car tout ne s’est pas passé comme prévu : Le signal est perdu peu avant l’insertion en orbite de Mars, sûrement à cause d’une fuite déclenchée par le mélange involontaire des ergols hypergoliques. Après cet échec, la NASA lance son programme Discovery qui regroupera notamment les sondes Messenger (vers Mercure), Kepler (téléscope spatial) mais aussi Mars Insight. La devise de ce nouveau programme était « better, faster, cheaper », sous-entendu plus de sondes à moindres coûts pour éviter un échec aussi important que Mars Observer. Ainsi, la NASA décide d’envoyer un orbiteur et un atterrisseur à chaque fenêtre de tir vers Mars, soit tous les deux ans, dans le cadre de ce programme. C’est pourquoi en 1996, l’atterrisseur Mars Pathfinder est lancé un mois après l’orbiteur Mars Global Surveyor. Pathfinder déposera à la surface le tout premier rover : Sojourner. Celui-ci roulera pendant quelques semaines et couvrira une centaine de mètres avant de cesser d’émettre par manque d’énergie.
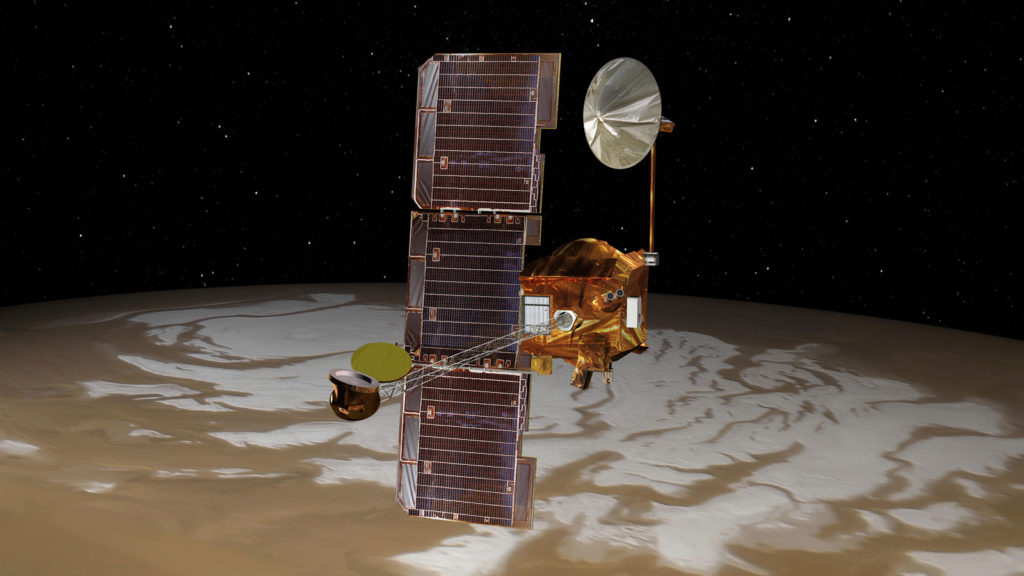
Deux ans plus tard, la sonde Mars Climate Orbiter décolle suivie par l’atterrisseur Mars Polar Lander. Cependant ces deux missions sont des échecs et la NASA décide d’arrêter les lancements doubles et de remettre en question la devise du programme Discovery. Ce double échec signe également l’annulation de la mission Mars Surveyor 2001 qui devait emporter un atterrisseur très similaire à Phoenix ou Insight. Ainsi, au début des années 2000, l’orbiteur 2001 Mars Odyssey est lancé pour étudier la répartition des minéraux sur Mars et rechercher la présence d’eau. La NASA en profite également pour modifier sa stratégie d’exploration martienne : elle souhaite ramener un échantillon afin de mieux étudier et comprendre les interactions qu’il y a eu entre l’atmosphère et l’eau sur Mars. Cependant une telle mission est très complexe, et pour l’instant, aucun orbiteur ne possède de caméra suffisamment puissante pour trouver un site d’atterrissage et de récolte convenable : Il faudra attendre 2006 et le Mars Reconnaissance Orbiter.
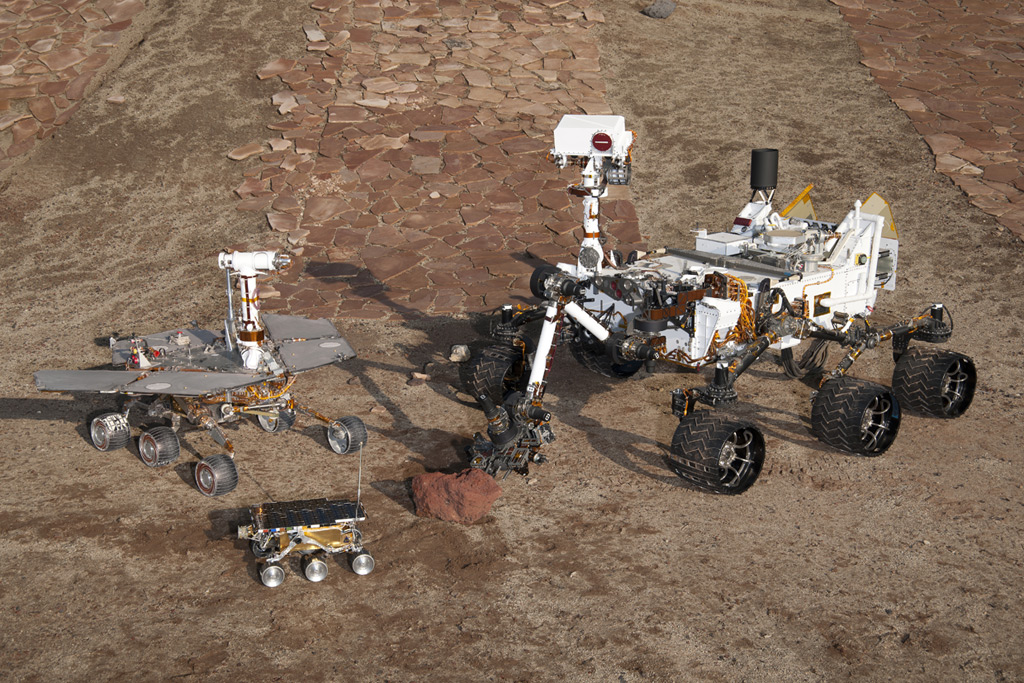
L’agence spatiale américaine décide donc de se rabattre sur une mission à visée géologique en attendant cette nouvelle sonde. Cette mission doit permettre d’explorer et d’analyser in situ les roches et reliefs martiens. Pour ce faire, il faudra nécessairement un rover. Impossible de dériver Sojourner pour accomplir cette mission car son autonomie était bien trop limitée pour une telle expédition. Le JPL (Jet Propulsion Laboratory) propose de développer un nouveau rover : Mars Exploration Rover (MER). Celui-ci sera bien plus grand que Sojourner, aura une meilleure autonomie et pourra transporter un nombre plus important d’instruments. Cependant il restera assez léger pour pouvoir utiliser des airbags pour atterrir sur Mars, comme avait réussi Mars Pathfinder. La NASA décide d’envoyer deux MER pour mettre toutes les chances de son côté et assurer la réussite de la mission. Elle argumente en précisant que le coût de fabrication d’un second MER est ridicule par rapport au coût de développement mais, en plus, qu’un double succès serait un bond de géant pour les résultats scientifiques. L’ensemble de la mission devra coûter 850 millions de dollars, autant que pour Mars Observer. Le lancement des deux rovers devrait avoir lieu lors de prochaine fenêtre : en 2003.
Les rovers MER sont équipés de sept instruments scientifiques et doivent parcourir plus d’1km pendant 90 jours martiens (ou sols). Les objectifs de cette mission sont nombreux :
- Rechercher des roches et des sols témoignant de la présence passée d’eau
- Déterminer la distribution et la composition des minéraux, roches et sols autour des sites d’atterrissage
- Déterminer les processus géologiques qui ont amenés à la formation de ces reliefs et sols.
- Valider les mesures faites depuis l’orbite afin de pouvoir déterminer la précision des instruments des orbiteurs
- Rechercher des minéraux contenant du fer et ceux ayant été formés dans l’eau ou qui en contiennent
- Déterminer la texture des roches ainsi que les caractéristiques des minéraux
- Déterminer si les environnements où de l’eau était présente à l’état liquide étaient propices à la vie
Les rovers de cette mission repose en grande partie sur les développements de missions passées. L’étage de croisière est dérivé de Mars Pathfinder tout comme le véhicule de rentrée et le module d’atterrissage. Certains éléments sont modifiés comme, par exemple, le parachute qui a été agrandi de 40% ou les moteurs qui sont désormais 90% plus puissants. Les instruments des rovers viennent, quant à eux, du rover Athena qui aurait dû accompagner Mars Surveyor 2001.
Les composants généraux des MER
Les deux sondes MER sont rigoureusement identiques. Même si les rovers, qui ne pèsent que 185kg chacun, ne représentent qu’une petite partie du poids total des sondes, ces dernières restent assez légères avec une masse de 1063kg. Chaque sonde est composée de quatre parties majeures : L’étage de croisière, le véhicule de rentrée, le module d’atterrissage et enfin le rover.
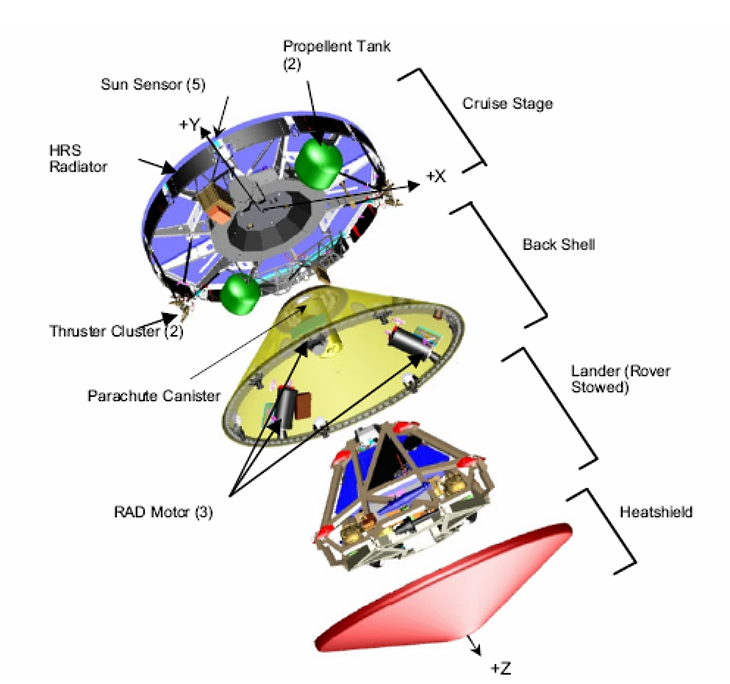
L’étage de croisière est chargé d’emmener le rover à bon port. Pour ce faire, il emporte 31kg d’hydrazine afin d’alimenter deux grappes de petits moteurs qui peuvent réaliser des corrections de trajectoire et/ou d’orientation. Il est également équipé de cinq détecteurs solaires et d’un suiveur stellaire afin de déterminer avec précision l’attitude de la sonde. Pour communiquer avec la Terre, l’étage de croisière transporte deux antennes, une à petit et une à moyen gain. Les deux transmettent les données de télémétrie et reçoivent les commandes en bande X. Cet étage dispose également d’une surface de 4,4m² de panneaux solaires afin de délivrer une puissance électrique de 300 à 600W tout au long du voyage. Ce disque de 2,65m de diamètre et de quelques dizaines de centimètres d’épaisseur est également équipé de radiateurs de manière à garder les systèmes dans des conditions thermiques acceptables. Cependant, l’étage de croisière ne possède pas d’ordinateur de bord. C’est le rover qui contrôle tout pendant le voyage. Une fois assez proche de Mars, cet étage devient inutile et est largué.

La seconde pièce majeure des sondes MER est leur véhicule de rentrée. C’est lui qui a pour objectif de les protéger lors de la rentrée à très haute vitesse (5,5km/s) dans l’atmosphère martienne. En effet, aussi ténue qu’elle soit, elle n’en reste pas moins présente et nécessite l’utilisation d’une protection thermique (ce qui n’est pas nécessaire lors d’un atterrissage sur la Lune par exemple). Ce véhicule de rentrée permet de résister à des températures allant jusqu’à 1500°C (en comparaison, l’acier fond aux alentours de 1400°C). Pour ce faire, il est équipé d’un bouclier thermique à l’avant ne pesant que 79kg et fabriqué dans un matériau ablatif qui évacue la chaleur en se consumant lentement. Le bouclier arrière, quant à lui, pèse 209kg et a une forme plus conique. Il est également recouvert d’un matériau ablatif mais bien plus fin car ce bouclier subit moins de chaleur. C’est également cette partie du véhicule de rentrée qui contient le gigantesque parachute supersonique qui ralentit la sonde lors de sa rentrée. Il est aussi équipé de plusieurs moteurs pour ralentir encore plus la sonde avant de passer à la dernière étape de la rentrée : l’atterrissage.



C’est le module d’atterrissage qui s’occupe de cette dernière phase critique avant de pouvoir commencer la science au sol. Il est largué à une vingtaine de mètres du sol et a pour seul objectif d’amortir le choc au moment du contact avec le sol. Comme pour Mars Pathfinder, c’est grâce à un ensemble d’airbags que cet amortissement est permis. Le module a une forme tétraédrique et chaque face possède un ensemble de 6 lobes gonflables. Ces derniers sont fabriqués en vectran, un matériau encore plus solide que le kevlar. Au total, ce module d’atterrissage pèse 348kg.
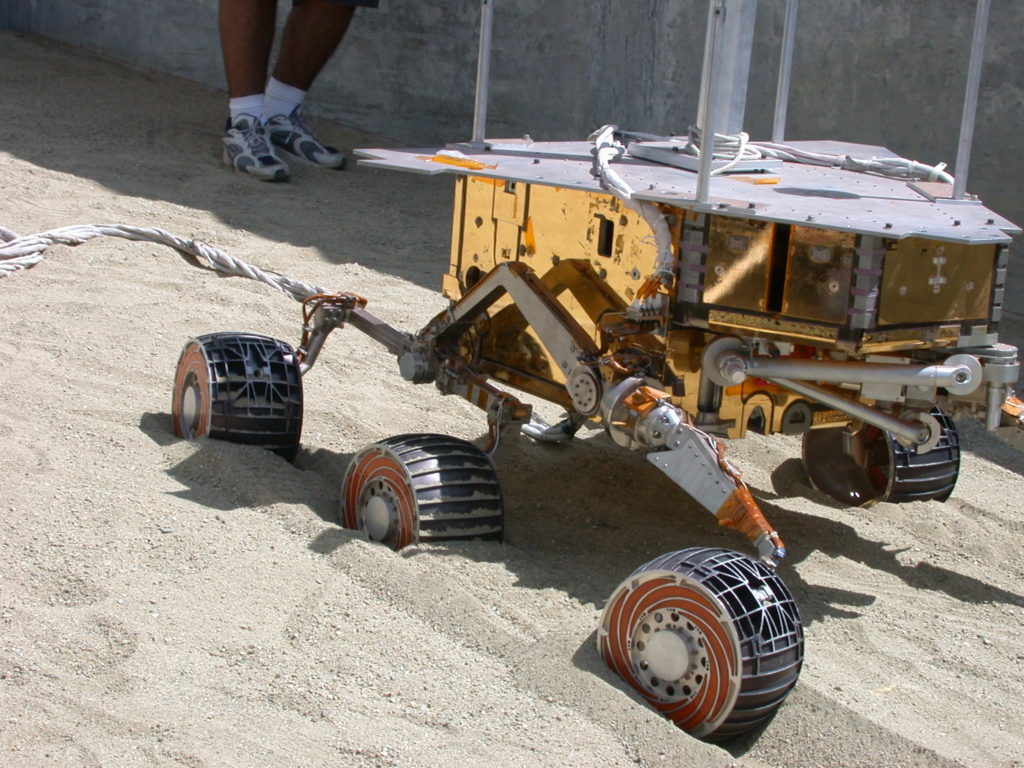
Enfin, la partie la plus importante de la sonde : le rover. Chaque rover mesure environ 1,5m de haut pour une largeur de 2,3m et une longueur de 1,6m. Le corps central des rovers est un bloc triangulaire qui abrite les composants ne pouvant pas résister aux conditions thermiques extrêmes de Mars. On y trouve donc l’ordinateur de bord, la centrale inertielle (qui permet de connaître l’orientation du rover), la partie électronique de certains instruments, les cartes de contrôles des moteurs des roues, les batteries, etc. Pour réguler la température, ce corps central est équipé de plusieurs systèmes. On y retrouve des radiateurs mais aussi une isolation passive avec un aérogel de silice et une feuille d’or. Pour lutter contre le froid, les ingénieurs ont décidés de placer huit pastilles de 2,7g chacune de dioxyde de plutonium, un composé radioactif qui émet de la chaleur. La chaleur libérée par l’électronique participe également à réchauffer cet intérieur.
Pour se propulser, le rover utilise un ensemble de six roues. Ces roues sont placées sur une suspension mise au point par la NASA et surnommée rocker-bogie. Elle permet de franchir des obstacles de plus de 26cm, soit plus que le diamètre des roues. Grâce à son centre de masse abaissée, le rover est théoriquement capable de gravir des pentes de 45° mais cet angle a été limité à 30° afin d’éviter tout problème. Chaque roue possède son propre moteur et les roues avant et arrière sont capables de pivoter afin de faire tourner le rover. Ce dernier peut atteindre une vitesse de 180m par heure mais il ne dépasse pas les 133m/h à cause du terrain et des changements de direction nécessaires.
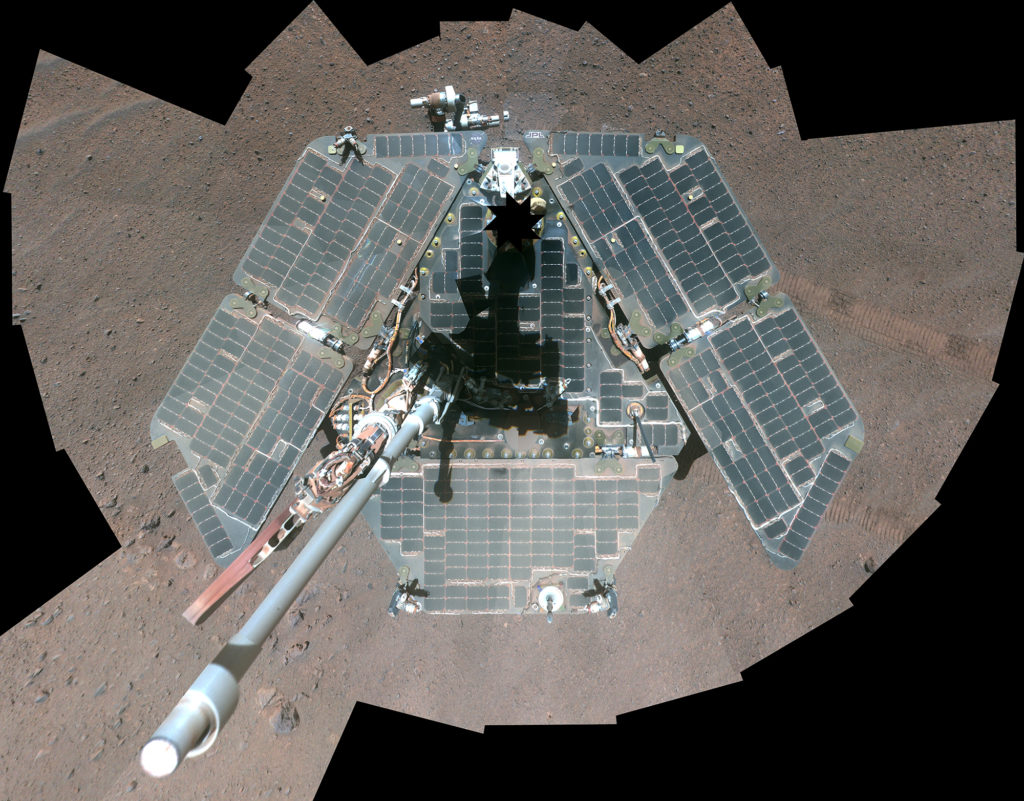
D’un point de vue électricité, chaque rover est alimenté par des panneaux solaires qui recouvrent le haut du corps central mais aussi des panneaux qui se déploient à l’arrière et sur les côtés après l’atterrissage. Au total, il possède une surface de 1,3m² de cellules photovoltaïques, ce qui lui fournit 200W au mieux. Ces panneaux ont été choisis de part leur très bon rapport rendement (28%) sur masse (2,06kg/m²). Au mieux, chaque rover peut produire 1kWh d’énergie par jour, quantité qui peut chuter jusqu’à 200Wh à cause de la poussière accumulée ou des tempêtes. Afin de continuer de fonctionner même par manque de soleil, chaque rover emporte deux batteries Li-ion de 8 cellules chacune pour un stockage de 16Ah à 32V par batterie. Ainsi, dans les meilleurs cas, le rover peut rouler pendant quatre heures sans s’arrêter.
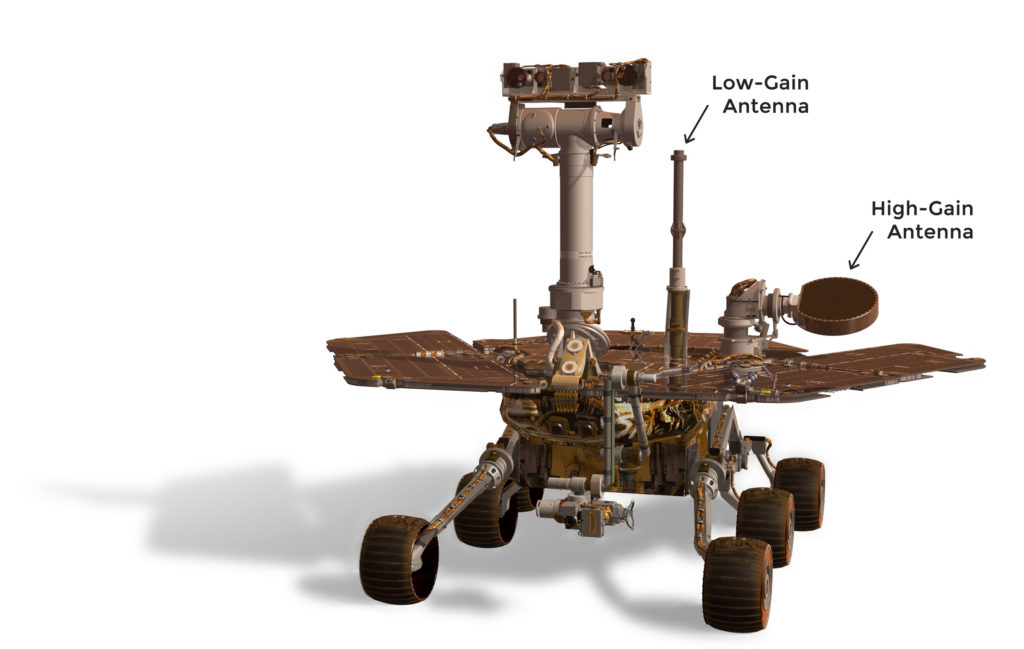
Pour ce qui est de la communication, le système est bien différent de Sojourner. En effet, ce dernier était dépendant de son atterrisseur et ne pouvait donc pas s’éloigner à plus de 500m sous peine de perdre le contact avec la Terre. Étant donné que les rovers MER doivent parcourir plus d’1km, ils doivent être totalement autonomes d’un point de vue communication. Ils peuvent donc envoyer leurs données directement aux orbiteurs qui servent de relais avant que les données ne soient captées par les gigantesques antennes du Deep Space Network ici, sur Terre. Mais ils sont également capables de communiquer directement avec la Terre, avec un débit cependant réduit. Chaque rover est équipé de trois antennes :
- Une antenne grand gain parabolique de 28cm qui permet la communication directe avec la Terre en bande X. Elle peut transmettre une grande quantité de données mais les temps de communication étaient limités à 3h/jour pour éviter de trop vider les batteries. Cette antenne a été ajoutée aux rovers afin de compenser l’abandon de la mise en place d’un réseau de communication en orbite de Mars. Cependant, il a aussi fallu supprimer un instrument scientifique (le spectromètre Raman) pour ne pas trop alourdir le vaisseau.
- Une antenne faible gain omnidirectionnelle qui permet au rover de communiquer avec la Terre en bande X avec un débit très faible.
- Une antenne UHF (Très Hautes Fréquences) omnidirectionnelle mais de portée plus réduite. C’est elle qui est utilisée pour communiquer avec les relais en orbite martienne (Mars Global Surveyor, Mars Odyssey et Mars Reconnaissance Orbiter). Les temps de communication durent entre 5 et 10 minutes suivant la sonde qui survole le rover.
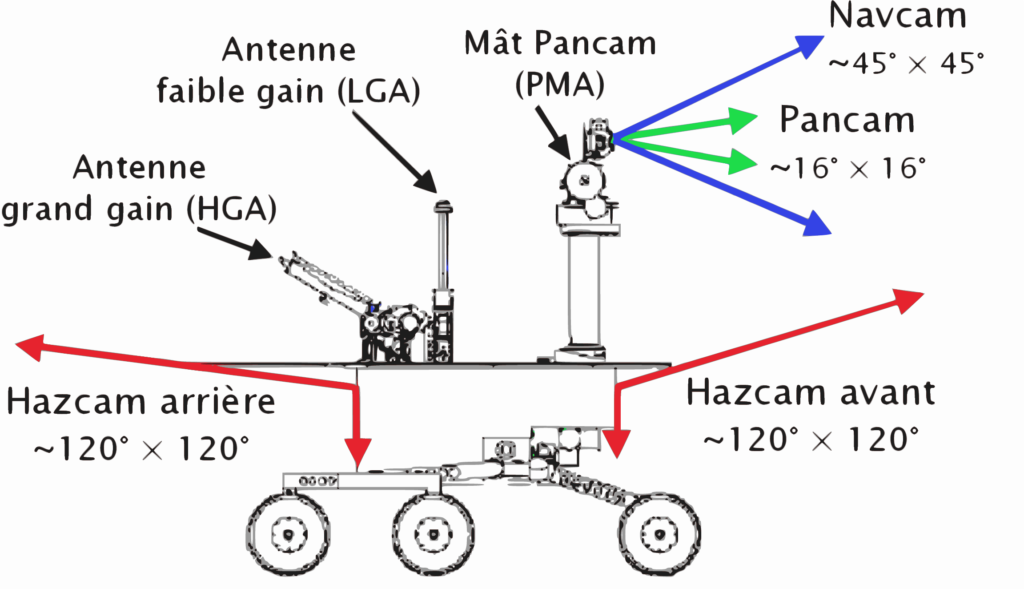
Pour naviguer sur Mars, les rovers MER sont équipés de beaucoup de capteurs. Ils possèdent une centrale inertielle avec trois accéléromètres et trois gyromètres afin de déterminer l’orientation du rover. En effet l’absence de champ magnétique empêche l’utilisation d’un magnétomètre pour savoir où se trouve le Nord. Des détecteurs permettent également de prévenir si les suspensions sont surchargées ou si le rover est dans une situation dangereuse. Chaque rover emporte également un lot de caméras :
Les Hazcams, deux paires de caméras monochromatiques, une à l’avant et une à l’arrière, possédant un grand angle (125°),
La Navcam, une paire de caméra grand angle (45°) située en haut du mât des rovers,
La Pancam, une paire de caméra couleur normalement à but scientifique mais qui sert également pour la navigation avec son faible angle (16°). Avec tous ces équipements, les rovers sont capables de détecter les obstacles sur son chemin et d’adapter leur trajectoire en conséquence.
Les instruments scientifiques emportés par les MER
Chaque rover MER emporte un total de 7 instruments afin de mener à bien sa mission scientifique :
Pancam : Cette double caméra est placée en haut du mât des rovers. Ainsi elle est capable de pointer n’importe où pour observer en détail les roches présentes sur le chemin des MER. Chacune des deux caméras est équipé d’un capteur CCD de 1024 pixels par 1024. Grâce aux deux caméras, il est possible de réaliser des images tri-dimensionnelles des roches, très pratiques pour les géologues. La Pancam est également équipé d’un jeu de filtres : huit filtres montés sur une roue et permettant d’imager à différentes longueurs d’ondes ; deux filtres solaires pour étudier l’absorbance des poussières en suspension dans l’atmosphère martienne ; des filtres pour étudier le spectre dans l’infrarouge avec la caméra droite ; des filtres pour étudier le spectre dans le visible avec la caméra gauche.

Mini-TES : Ce spectromètre fixé en haut du mât, à côté de la Pancam, permet d’étudier la composition minéralogique des roches et des sols. Pour ce faire, il mesure le rayonnement infrarouge naturellement émis par les sols.
APXS : L’instrument Alpha Particle X-ray Spectrometer est placé au bout du bras robotique des rovers. Le but de cette expérience est d’étudier l’abondance des éléments chimiques présents dans les roches. Pour ce faire, une source radioactive de Curium 244 bombarde de particules alpha et de rayons X l’échantillon à étudier. Le spectromètre analyse ensuite les rayons X et les particules alpha émis par les éléments présents dans l’échantillon. Cet instrument a été développé par l’institut Max Planck de Chimie à Mayence en Allemagne.
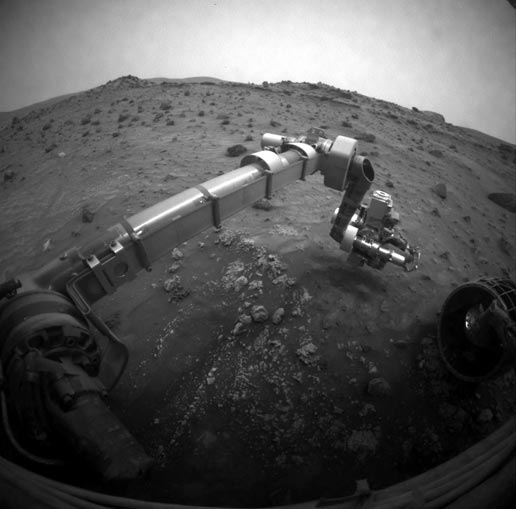
MIMOS II : C’est dans la même ville que pour APXS qu’a été développé MIMOS II mais dans l’Université Johannes Gutenberg. Ce spectromètre dit Mössbauer utilise un faisceau de rayons gammas afin de réaliser une étude précise de la minéralogie des roches. Et comme APXS, il est placé sur le bras robotiques des rovers.
RAT : Cet outil a un but très simple : enlever les poussières au-dessus des roches pour permettre de meilleures mesures par les autres instruments des MER. RAT est une meule de 4,5cm de diamètre constituée d’éclats de diamants et permet de nettoyer la roche sur une profondeur de 5mm.
Microscopic Imager : Placé sur le bras robotique, ce microscope permet d’obtenir des images du sol d’une résolution impressionnante : 20 à 40µm/pixel.
Piège à particules magnétiques : Un ensemble de 7 aimants a été placé sur le corps des rovers MER. Ainsi, les particules magnétiques en suspension dans l’atmosphère martienne viennent s’y fixer. Elles sont ensuite étudiées par MIMOS II, APXS ou Miscroscopic Imager.
La mission de Spirit et d’Opportunity
en direction de Mars. Crédit : NASA
en direction de Mars. Crédit : NASA
en direction de Mars. Crédit : NASA
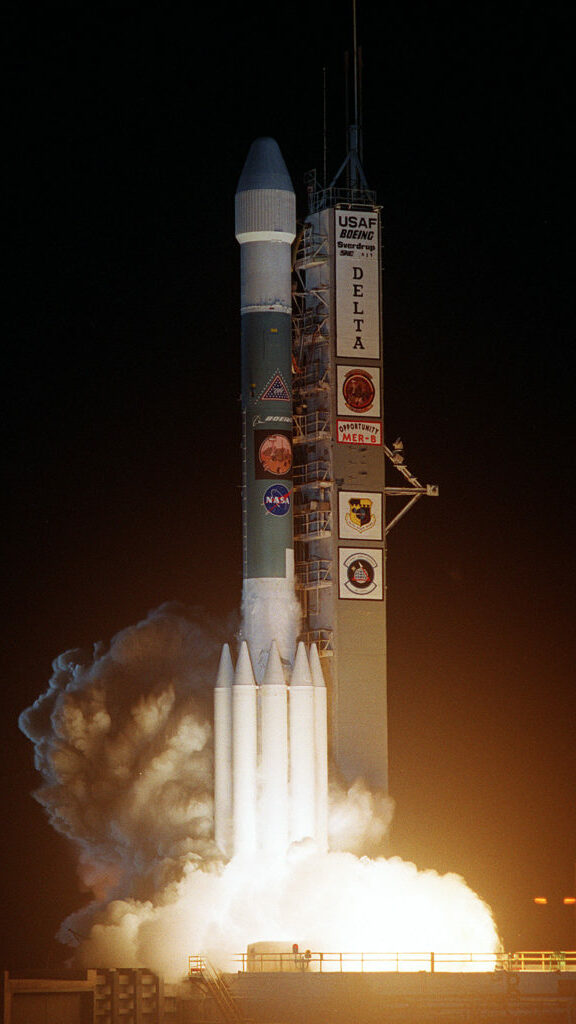
Les deux sondes MER étaient initialement appelées sous les noms MER-A et MER-B. MER-A a ensuite été renommé en Spirit et MER-B en Opportunity. Spirit a été lancée le 10 juin 2003 depuis le pas de tir 17A de Cape Canaveral à bord d’une Delta II 7925. Opportunity est parti quatre semaines plus tard, le 7 juillet, depuis le pas 17B à bord d’une Delta II 7925H. En effet, à cause des quelques semaines de retard, la puissance nécessaire pour le transfert vers Mars augmente tellement qu’il faut utiliser la version lourde du lanceur. Cette version remplace les boosters GEM-40 par des GEM-46, légèrement plus gros et offrant donc une plus grande puissance. Ces lanceurs étaient également équipés d’un étage supplémentaire Star48B afin de fournir la poussée nécessaire au voyage.
Le transit Terre-Mars a duré environ six mois pendant lesquels les sondes ont parcouru plus de 500 millions de km. Durant ce trajet, cinq manœuvres de correction ont été réalisées. La dernière était facultative mais permettait d’être plus précis quant au lieu d’atterrissage. Lors de cette phase, la position précise des sondes était mesurée grâce au temps que mettent les ondes radio pour rejoindre la Terre. Pour ce qui est de la vitesse, elle était donnée grâce à l’effet Doppler mais aussi avec une technique appelée DDOR mise au point pour l’occasion qui visait à mesurer simultanément la position de la sonde et la position d’un quasar avec deux antennes sur Terre.
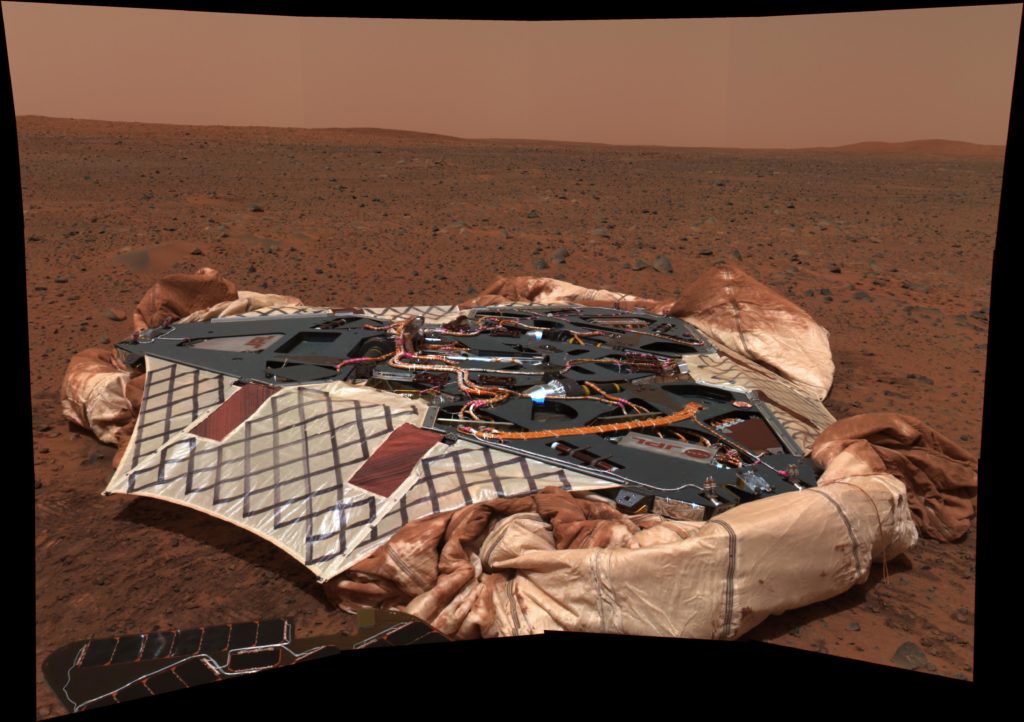
Après ces six mois de transit, les sondes frappent l’atmosphère martienne à une vitesse de 5,5km/s. C’est d’abord le véhicule de rentrée qui freine les sondes : Les frottements avec l’atmosphère réduisent la vitesse par un facteur 15. Un parachute est ensuite déployé alors que les sondes se déplacent encore à 1,77 fois la vitesse du son. Celui-ci divise encore la vitesse par 7. A ce moment, cette dernière est inférieure à 50m/s. Les airbags se gonflent ensuite et le parachute est largué. Les propulseurs prennent le relai et viennent annuler toute la vitesse du module d’atterrissage à une vingtaine de mètres du sol, point où ce dernier est largué. Les airbags amortissent le choc final et, une fois que l’ensemble a arrêté de rebondir et de rouler, se dégonflent et s’ouvrent. Tous ces évènements ont eu lieu le 3 janvier 2004 pour Spirit qui a atterri dans le cratère Gusev, à 15° au sud de l’équateur, et le 24 janvier 2004 pour Opportunity qui s’est posé sur Meridani Planum, quasiment à l’équateur.
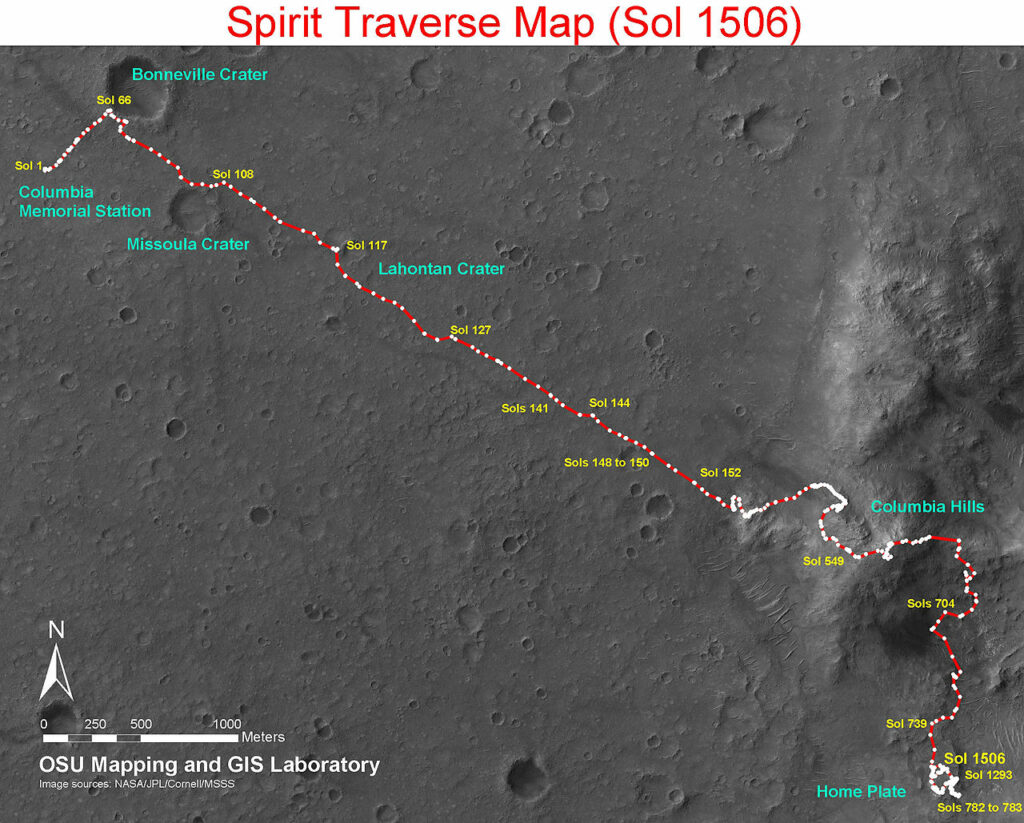
Spirit parcourt ensuite plus de 7,7km. Elle visite tout d’abord le cratère Bonneville en espérant y trouver des roches mises à l’affleurement par l’impact de la météorite…mais rien n’est visible. Le rover s’élance ensuite vers les collines Columbia. Elle arrive à leur base en juin 2004 et se hisse au sommet de la plus haute plus d’un an après, en août 2005. Sur son trajet, Spirit a trouvé des roches témoignant de la présence d’eau liquide ! Durant l’ascension des collines, les panneaux solaires, salis par la poussière, ont magiquement été nettoyés par des petites tornades se formant régulièrement partout sur Mars. Le rover descend ensuite vers Home Plate où elle restera de 2006 à 2008. Là, sa roue avant-droite se coince et le rover doit donc progresser en marche arrière pour compenser. Spirit s’immobilise pendant 8 mois pour recharger entièrement ses batteries d’avril à novembre 2006.

Après ce long sommeil, Spirit est réveillée mais sa roue coincée ne démarre toujours pas. Elle continue donc d’avancer à reculons et ce comportement handicapant finit par présenter un avantage : La roue immobile a retiré la couche superficielle de poussière au-dessus du sol pour y laisser apparaître un mélange de silice et d’or en proportions inhabituelles. Encore plus dingue, ce matériau ne se forme qu’en présence d’eau ! En décembre 2008, Spirit est mise en route vers les formations géologiques Goddard et Von Braun. Malheureusement, en mai 2009, les roues du rover se bloquent dans un banc de sable fin. Les ingénieurs du JPL tentent tout pour la sortir de là… en vain. Spirit finira par s’éteindre définitivement en mars et la NASA abandonnera toute communication en mai 2011. Le rover aura tout de même bien surpassé les attentes initiales en parcourant 7 fois plus de distance et en restant en fonctionnement 20 fois plus longtemps que prévu !
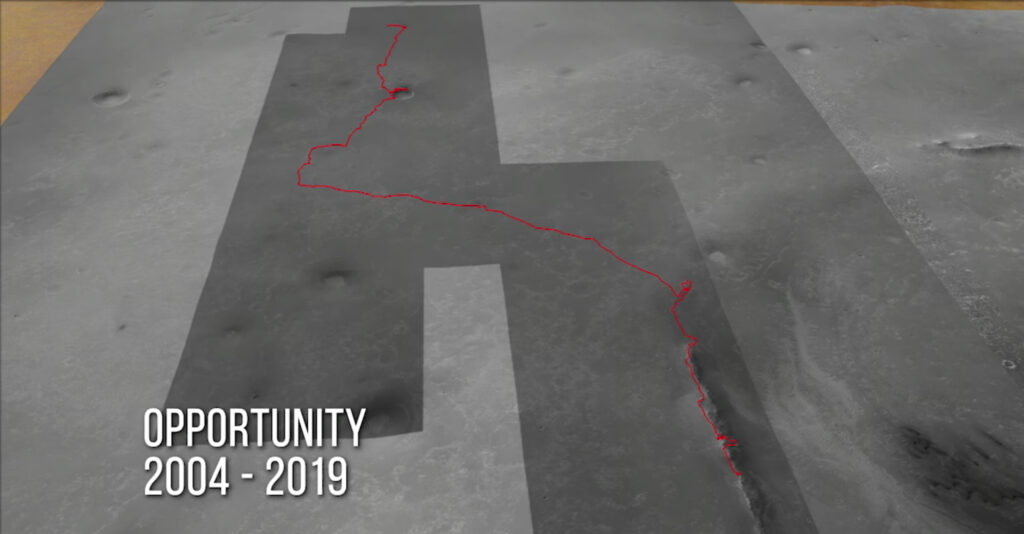
Opportunity a été encore plus impressionnante ! Elle commence par visiter le cratère Eagle dans lequel elle s’est posée. Ici, elle identifie des roches détectées par Mars Global Surveyor et qui contiennent de l’hématite grise, un minéral souvent formé en présence d’eau. Opportunity réussit à trouver de nombreux indices montrant la présence passée d’eau à cet endroit. La même année, le rover se dirige vers le cratère Endurance à 750m. Elle l’atteint fin avril 2004 et en étudie les bords. Les scientifiques au sol décident de prendre la décision de faire descendre Opportunity dans le cratère. Elle y passera 180 jours avant d’en ressortir sans problème, malgré les craintes des ingénieurs, en décembre 2004. A partir de 2005, Opportunity commence sa route vers le cratère Victoria à 9km de là. Au cours de son voyage, Opportunity croise le bouclier thermique qui l’avait protégé lors de la rentrée avant d’être largué. C’est également lors de ce trajet que, le 20 mars 2005, Opportunity bat le record de distance parcouru sur Mars en un jour : 200m. Fin avril, le rover se bloque dans une dune de sable, mais contrairement à Spirit, elle réussit à s’en sortir en faisant marche arrière. Le bras robotique subit une première défaillance qui, à la suite d’une seconde en 2008, forcera les ingénieurs à toujours garder le bras déployé.

Fin septembre 2006, Opportunity atteint le cratère Victoria. Le rover sera immobilisé quelques mois en 2007 à cause de tempêtes qui ont recouverts de poussières ses panneaux solaires. Au final, Opportunity quitte le cratère en septembre 2008 et se dirige vers le cratère Endeavour qu’elle atteindra en 2011. En juin 2010, Opportunity a déjà parcouru 21,4km depuis son atterrissage mais se situe encore à 12km du cratère Endeavour à cause de détours nécessaires pour éviter une plaine sableuse. Le 9 août 2011, le rover atteint enfin cette formation et commence à l’explorer. Dans les années qui suivent, la quasi-totalité des instruments tombent hors-service, ayant dépassé depuis longtemps la durée de fonctionnement prévue. Les caméras commencent à être sales et les batteries fatiguent. C’est au final au milieu de l’année 2018 que le rover Opportunity rend l’âme. A cause d’une tempête majeure qui a privée la quasi-totalité de la surface de Mars de lumière pendant plusieurs mois, les batteries du rover se sont presque entièrement vidées. Malgré le retour du Soleil, les panneaux solaires n’arriveront jamais à recharger les batteries suffisamment pour redémarrer Opportunity. Ainsi, le 13 février 2019, après plus de 800 tentatives de communication, la NASA annonce officiellement la fin de la mission Mars Exploration Rover. Opportunity aura parcouru plus de 45km et reste encore aujourd’hui le robot qui a le plus visité Mars. Son dernier message aura été « Mes batteries sont presque vides et il fait de plus en plus noir ici » (message un peu romancé par rapport à ce qui a vraiment été reçu par les antennes sur Terre).