
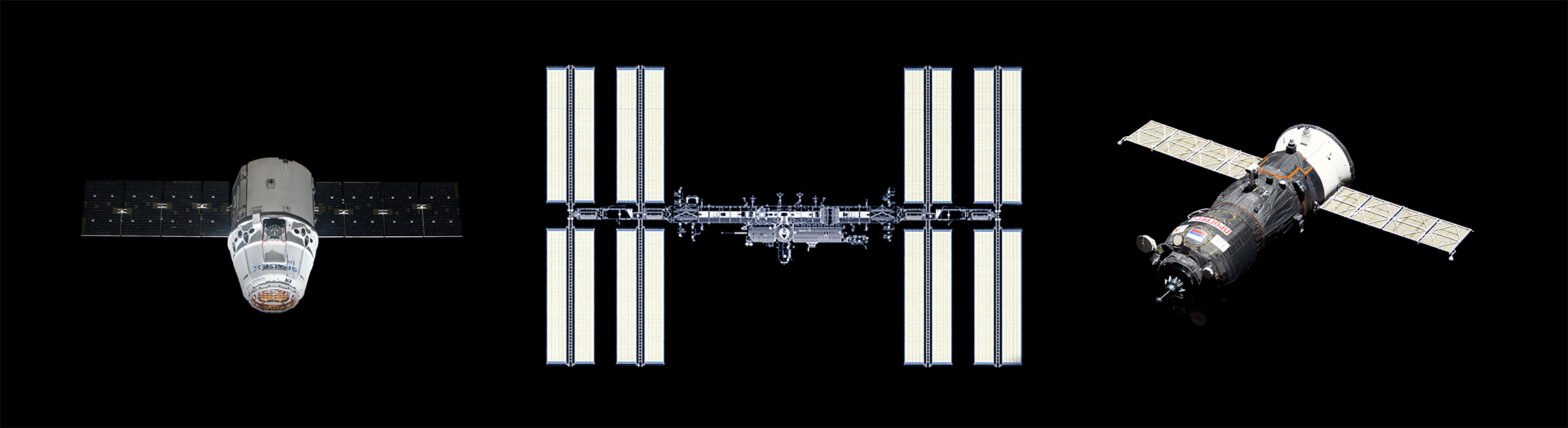
La Station Spatiale Internationale a constamment besoin de ravitaillement, qu’il s’agisse de vivres pour les astronautes ou d’expériences scientifiques que ces derniers devront réaliser ou encore des pièces de rechange pour réparer les éléments défectueux de ce gigantesque laboratoire. En moins de deux semaines, la station a ainsi reçu deux nouveaux cargos et pas moins de 5,5 tonnes de charge utile. Ces deux cargos, ce sont le Dragon CRS-15 de SpaceX et la Progress MS09 de Roscosmos. Le premier a décollé le 29 juin à 11h42 CEST et s’est arrimé à la station un peu plus de trois jours après, le second est parti de la Terre le 10 juillet à 23h51 CEST avant de rallier l’ISS en seulement trois heures et quarante minutes !!

CRS-15

La mission CRS-15 est, comme son nom l’indique, la quinzième mission de ravitaillement de l’ISS de SpaceX. Celle-ci a décollé depuis Cape Canaveral et le pas de tir SLC-40. Le contrat existant entre la société privé d’Elon Musk et la NASA était initialement prévu pour prendre fin à CRS-12 mais il a été étendu jusqu’à CRS-15 en début 2015 et même jusqu’à CRS-20 en février 2016. Cependant, SpaceX a arrêté la construction de ses capsules Dragon avec CRS-12. Comment continuer de ravitailler l’ISS sans fabriquer de nouveaux cargos ? C’est simple, il suffit de réutiliser les anciens ! Ainsi, le cargo utilisé pour CRS-15 avait déjà volé lors de CRS-9 il y a deux ans. Seules deux parties ont dû être reconstruites entièrement : le nez aérodynamique qui protège le port d’arrimage au décollage et le « trunk », sorte de grande soute où sont placés les plus gros équipements de la station et où on retrouve également les panneaux solaires du Dragon, ce « trunk » est séparé avant la rentrée atmosphérique car il cacherait le bouclier thermique.
CRS-15 a amené à la station pas moins de 2697kg de matériels dont :
- 205kg de vivres
- 1233kg de matériels scientifiques
- 63kg d’équipement pour les EVAs
- 178kg d’électronique de bord
- 21kg de ressources pour les ordinateurs de la station
- 12kg de matériel pour la partie russe
- 985kg de charge utile non pressurisée (dans le « trunk ») dont ECOSTRESS (550kg) et une nouvelle LEE (435kg).
Dans un premier temps, parlons du matériel non pressurisé. La LEE (Latching End Effector) est une des deux « têtes » du bras robotique Canadarm 2. C’est cette pièce qui permet au bras d’attraper des cargos comme le Dragon ou Cygnus afin de les arrimer à l’ISS. Cette même partie du Canadarm 2 lui permet de se déplacer sur la station en s’attachant à un des nombreux points présents à l’extérieur de l’ISS avant de relâcher son précédent point d’accroche où l’on trouve une autre LEE. Les dernières EVAs sur la station se sont beaucoup concentrés sur ces pièces en remplaçant les anciennes par les nouvelles. Ainsi, le Canadarm 2 était équipé des dernières technologies mais plus aucune pièce de rechange n’était disponible pour la LEE. Cette dernière est sûrement une des pièces les plus critiques sur la station car si une des deux tombe en panne en orbite, seul le cargo russe Progress pourrait ravitailler la station car il est le seul à savoir se « docker » sans bras robotique. Problème, le Progress ne peut pas transporter de nouvelle LEE de rechange. Seul le Dragon a un espace assez grand pour l’apporter en orbite. Il était donc crucial pour les ingénieurs d’amener cette nouvelle LEE au plus vite afin de pouvoir remplacer celles déjà existantes en cas de défaillances.

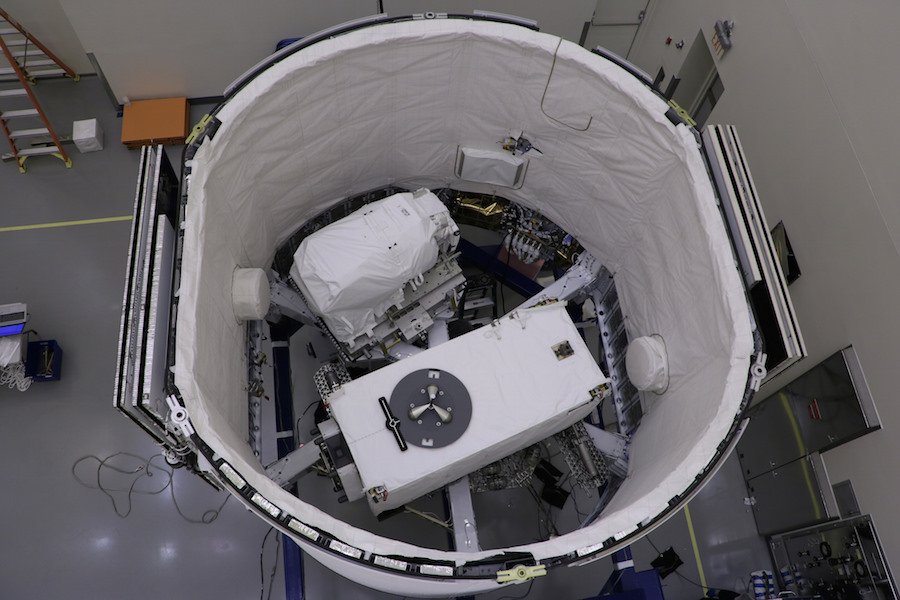
La seconde charge utile non pressurisée est l’expérience scientifique ECOSTRESS. Cette dernière sera fixée sur le Site 10 de la table du laboratoire japonais Kibo. Cette table située dans le vide spatial est un des trois endroits les plus utilisés pour placer les expériences (les deux autres étant la poutre et l’extérieur droit du laboratoire Colombus). ECOSTRESS a été construit par le JPL de la NASA afin de cartographier la Terre dans les infrarouges. C’est l’instrument PHyTIR (Prototype HyspIRI Thermal Infrared Radiometer) qui prendra ces photos. Ce dernier a une résolution de 38m dans le sens de déplacement de la station et de 69m à 90° de ce précédent sens de déplacement. La résolution minimale nécessaire pour ce type d’expérimentations est de 100m. Cette même caméra développée par l’ESTO (Earth Science Technology Office) pendant le programme d’incubation d’instrument peut également détecter des variations de température de moins de 0,1K alors que le minimum requis est de 0,3K. Grâce à cette instrumentation et cette cartographie, les agriculteurs du monde entier pourront savoir gratuitement quelles parties de leurs champs sont mal hydratées en détectant les parties trop chaudes. Ainsi, l’eau sera utilisée de manière plus efficace et évitera un gaspillage important (l’agriculture est le premier usage de l’eau dans le monde avec 70%).
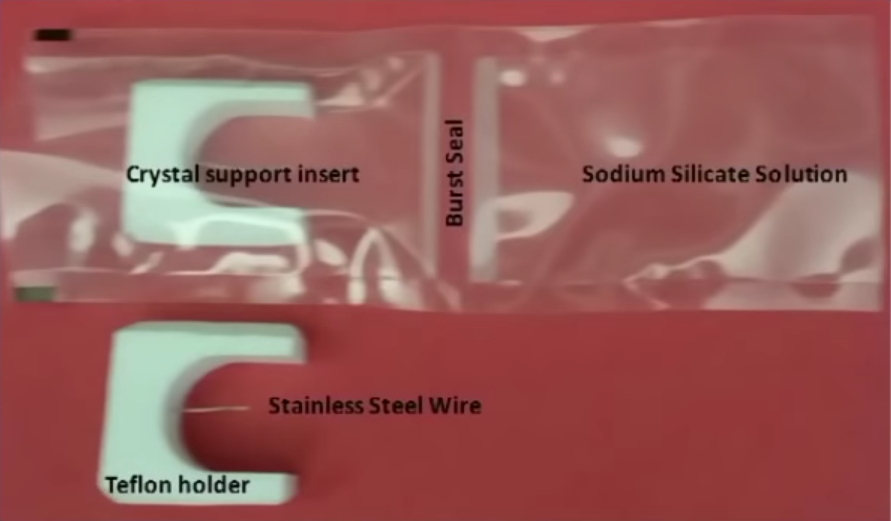
Parmi les nombreuses expériences à bord du cargo Dragon CRS-15, on retrouve Barrios PCG. Cette dernière a été développée par Barrios Technology et a pour but d’étudier la croissance de cristaux de manière organique. Cette expérience sera réalisée dans la boîte à gants du laboratoire Destiny et les astronautes ajouteront de la solution de silicate de sodium en roulant le sachet, ce qui permettra la formation de cristaux sur le fil d’acier. En étudiant les tests, les futures itérations de l’expérience pourront être optimisées afin d’étudier la formation de protéines dans notre corps mais aussi le fonctionnement de certains médicaments.
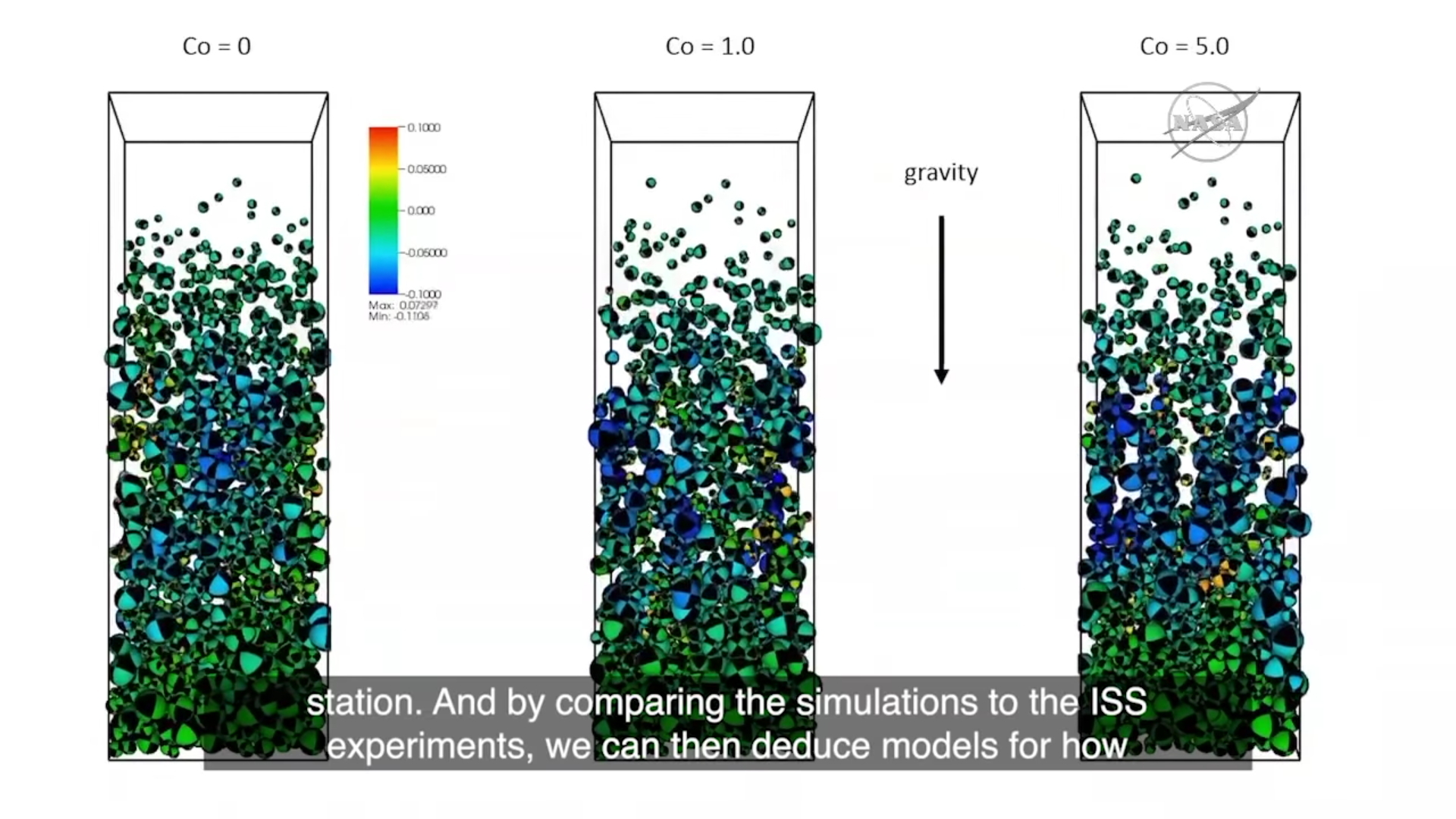
L’expérience BCAT-CS de sont côté va étudier une interaction nommé « force cohésive » dans les sédiments. Cette force est très présente dans la manière dont les sédiments sont transportés dans l’environnement mais aussi dans des systèmes mécaniques mais sa faiblesse la rend très dure à étudier sur Terre car la gravité prend le dessus bien souvent. La compréhension de cette force pourra nous permettre de mieux appréhender la transportation de contaminants et de polluants. Le but de BCAT-CS est donc de réaliser différentes expériences basées sur cette force cohésive afin de comparer les résultats réels avec les simulations numériques faites ici, sur Terre. Une fois le modèle mathématique trouvé, il sera bien plus simple d’étudier tous les phénomènes liés à cette interaction.
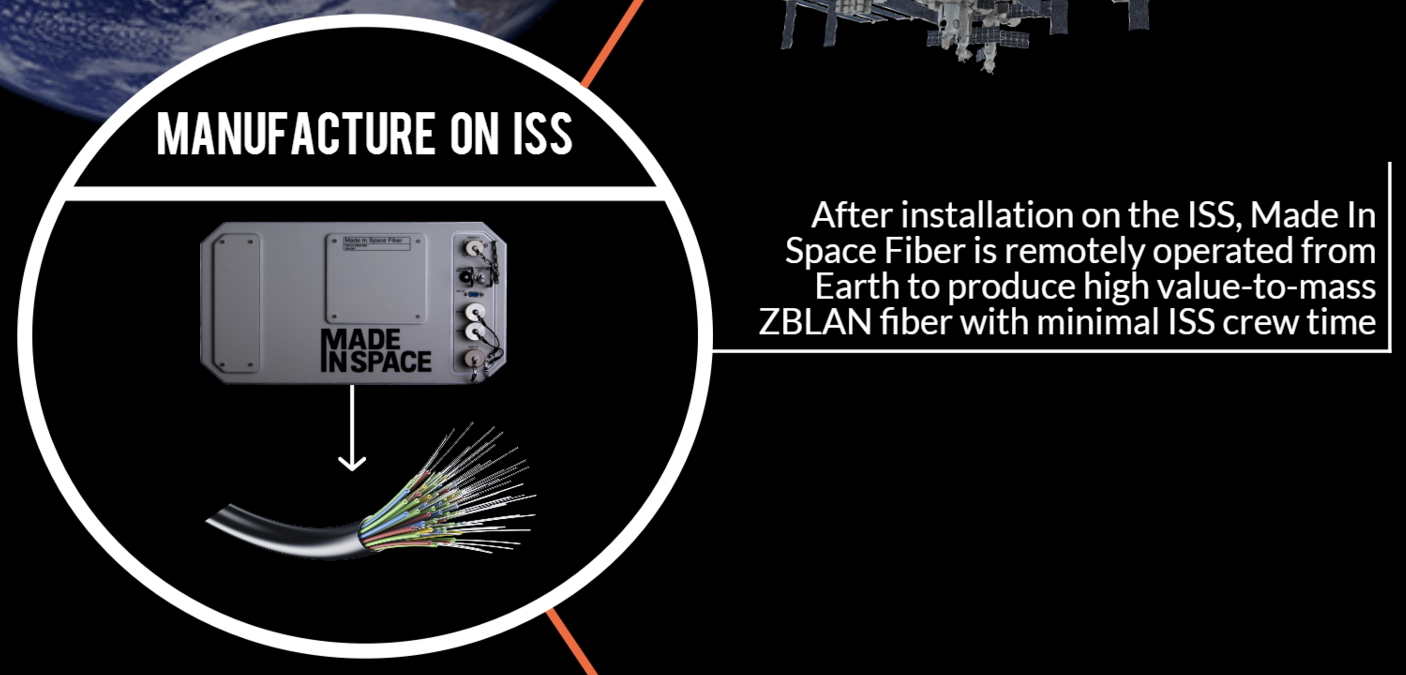
Made In Space Fiber Optics-3 est une expérimentation qui vise à étudier la meilleure manière de produire des fibres optiques dans l’espace. En effet il a déjà été prouvé que la manufacture dans l’espace des ces dernières permet d’éliminer beaucoup plus facilement les impuretés et donc d’obtenir une fibre de bien meilleure qualité. La fibre optique ZBLAN pourrait ainsi dépasser de très loin celles fabriquées sur Terre. Dans un futur proche, Made In Space espère pouvoir envoyer sa fabrique de fibres optiques à bord de l’ISS. Mais avant cela, les ingénieurs cherchent à optimiser et encore optimiser leur résultat, d’où cette troisième itération de leur expérience.
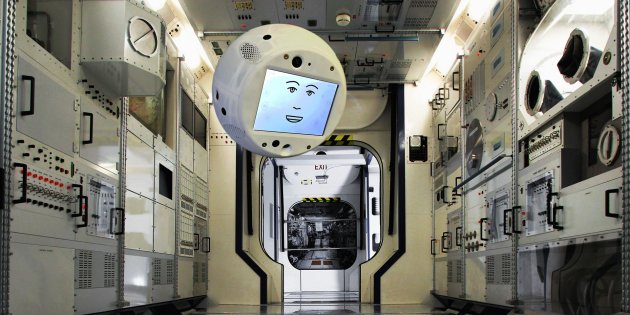
Il reste encore de nombreuses expériences dont vous pourrez retrouver des descriptifs à l’adresse suivante : https://www.iss-casis.org/press-releases/spacex-crs-15-mission-overview/ mais il est maintenant temps de parler du robot CIMON. Ce dernier est le tout premier assisant autonome volant d’astronaute équipé d’une intelligence artificielle. Ce démonstrateur technologique développé par l’agence spatiale allemande, le DLR, va être installé dans le laboratoire Colombus est sera utilisé par l’astronaute de même nationalité pendant son séjour de six mois et sa mission « Horizons ». CIMON (Crew Interactive MObile companioN) a un diamètre de 32cm pour une masse de 5kg. Il possède plusieurs petits ventilateurs qui lui permettent de se déplacer partout sur la station. CIMON peut voir, entendre, comprendre et parler avec les astronautes pour leur donner les instructions d’une certaine expérience lorsque le centre de contrôle de cette dernière n’est pas disponible par exemple. Le 9 mars 2018, le premier test en microgravité de CIMON a eu lieu lors de la 31ème campagne de vol ZeroG allemande à Bordeaux. Ce test a permis de vérifier que tous les éléments de contrôle fonctionneraient une fois sur la station. Maintenant arrivé sur l’ISS, CIMON va réaliser toute une série de vérifications de son intégrité avant d’aider Alexander Gerst dans son travail. Les trois expériences prévues sont la pousse de cristal vue précédemment, la résolution d’un Rubik’s Cube et même une expérience médicale dans laquelle l’assistant volant servira de caméra. Si ce prototype est un succès, il sera très utile pour les astronautes sur l’ISS mais aussi et surtout lors de mission dans l’espace lointain comme Mars car les communications avec la Terre seront longues et pouvoir avoir accès à tout un protocole directement via un assistant robotique sera plus simple et plus pratique.

Le vol de CRS-15 utilisait donc un cargo réutilisé mais également un premier étage réutilisé. Le booster de la Falcon 9 avait ainsi volé lors du lancement de TESS et a été le dernier Block 4 a emmené un objet en orbite. Ce vol a également été la réutilisation la plus rapide d’un booster avec seulement 2 mois et 11 jours entre les deux lancements. Comme tous les précédents vols de booster ayant déjà réalisé une première mission, le premier étage de CRS-15 n’a pas été récupéré et a sûrement testé un profil de rentrée atypique pour assurer une réussite à 100% du Block 5 qui doit pouvoir voler 10 fois sans réparation majeure et jusqu’à 100 fois avec des révisions plus importantes tous les 10 vols. Ce dernier vol marque donc la fin du Block 4, itération de la Falcon 9 qui n’a connu aucun échec !

Après trois jours de voyage en orbite, le Dragon CRS-15 s’est approché de la station. Une fois à 10m, les astronautes de l’ISS ont commandé le Canadarm 2 pour attraper le cargo. Une petite attente a eu lieu car il faisait trop sombre et l’image qu’obtenait les astronautes de la caméra placée sur le bras avait trop de bruit numérique à cause de cette pénombre. Une fois le bras robotique et le cargo lié, ce sont des techniciens au sol qui se sont occupés d’arrimer CRS-15 au port nadir (du côté de la Terre) du nœud Harmony le 2 juillet à 15h50 CEST. Voici une magnifique vidéo de cette dernière phase du voyage du cargo : www.twitter.com/astro_ricky/status/1014981035887558656?s=19 .
Progress MS09
Une semaine après l’arrimage de CRS-15, c’est le cargo russe Progress MS09 qui décollait depuis Baïkonour. Contrairement au Dragon, ce vaisseau a surtout amené des vivres et des consommables :
- 705kg de carburant
- 50kg d’oxygène et d’air
- 420kg d’eau
- De la nourriture

Cette mission est pour le moins très importante pour l’agence spatiale russe. Dans un premier temps elle représente le voyage le plus court vers l’ISS jamais réalisé. En effet entre le décollage et le « docking », il ne s’est passé que 3h40 et deux orbites !! Ce temps de ravitaillement très court peut s’avérer pratique mais il demande une précision hors-norme. En effet quelques semaines avant le décollage, la station avait légèrement modifié son orbite afin de pouvoir réaliser ce rendez-vous rapide. C’est la fusée Soyuz 2.1a qui s’est occupée de placer le Progress en orbite. Ce voyage est devenu le troisième « docking » le plus rapide de l’histoire. Le premier est l’expérience Cosmos 186/188 en 1967 avec un temps entre décollage et arrimage de 1h8min et le deuxième est la mission Gemini 11 et son arrimage à la cible Agena.

Le deuxième point qui rend cette mission critique pour la Russie est au moment de son désarrimage. Effectivement, Progress MS09 s’est « docké » au port Pirs qui se situe au nadir de la station. Lors de son départ, ce n’est pas le Progress qui se séparera de Pirs mais bien Pirs se détachera de Zvezda. Et oui ! Pirs est retiré de la station et brûlera dans l’atmosphère avec le Progress MS09. L’agence spatiale russe a décidé d’enlever ce module pour préparer l’arrivée du futur laboratoire Nauka qui aurait dû décoller depuis quelques années mais qui est maintenant prévu pour l’année prochaine.

Le lancement s’est déroulé sans accros et porte ainsi à 57, le nombre de lancements orbitaux en 2018 (58 au moment de la publication de cet article à la suite du lancement de la fusée chinoise Long March 3A).
